Basic Approach¶
Outline¶
Questions¶
What is the approach for finding events in dupin?
What is the basic definition for each step in the event detection scheme?
Objectives¶
Explain the six step model for event detection used by dupin.
Define the basic outline of each step.
Six Step Detection¶
dupin is based on a 6 step method for detecting events in point cloud data.
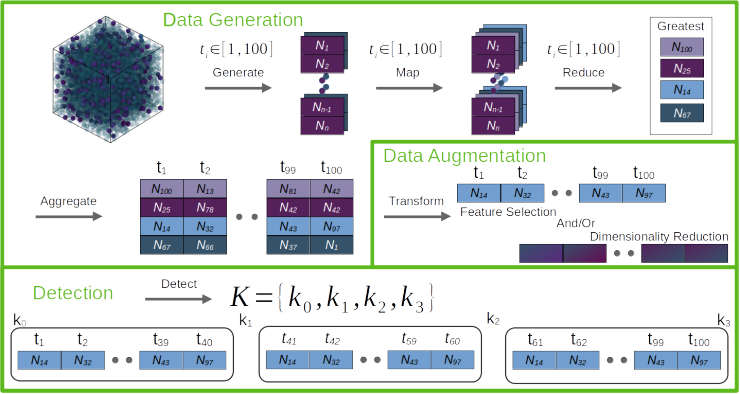
Generate: Generate basic features from the point cloud. Such features can be per-point, aggregate, or global.
Map: Transform the generated data into different distributions such as neighbor point averaging.
Reduce: Take the non-scalar features and create scalar features from them (e.g. maximum, minimum, spread, mean, …).
Aggregate: Perform the first three steps across the time dimension of the point cloud data.
Transform: Transform the signal using signal processing into a new feature signal (essentially the map step applied in the time direction). This step can involve feature selection or dimensionality reduction.
Detect: Given the final feature signal detect events if any in the data.
The first, fourth, and sixth steps are always necessary; however, most are useful in common use cases. This tutorial will go through all six step in the detection process.